XTS 로드쇼 전경
4차산업혁명 시대를 맞아, 다품종소량 생산을 가능하게 하는 지능형 이송시스템이 트렌드로 급부상하고 있다. 이러한 가운데, Beckhoff Automation Korea(이하 Beckhoff Korea)가 지난 10월 22일 메이필드 호텔에서 XTS(eXtended Transport System) 로드쇼를 개최했다. Beckhoff의 XTS는 공정에서 소재를 고속으로 이송하거나 분류하는 모든 어플리케이션에 적합한 이송시스템으로서, 7년 전에 글로벌 시장에 출시된 이래 전 세계적으로 많은 고객을 확보하고 있다.
이날 로드쇼를 통해 Beckhoff Korea는 XTS의 다양한 기능과 실제 적용사례를 동영상을 통해 소개하는 한편, 고객이 XTS를 쉽게 어플리케이션에 적용할 수 있도록 하기 위해 자사가 얼마나 많은 펑션을 제공하고 있는지에 대해 설명했다. 이와 함께 XTS가 비전 솔루션과 협업해서 다양한 물체를 인식하고, 부품 누락 등을 검사하는 등, 다른 자동화 작업과의 실시간 동기화 또는 첨단 추적 솔루션을 지원하는 기능을 소개, 참관객들의 관심을 끌었다. 이와 함께 Hepco Motion Korea에서 XTS Hepco 가이드 시스템인 ‘GFX’ 에 대한 발표를 진행했다. 이날 XTS에 대한 모든 소개는 Beckhoff 독일 본사의 Senior Application Engineer인 Rob Rawlyk 씨가 담당했다.

Beckhoff Korea 유기석 지사장이 환영사를 하고 있다.
Beckhoff Korea 유기석 지사장은 인사말을 통해, 지난주 상해에서 아시아 지역 17곳의 Beckhoff 지사장들을 만나 정보를 교환하는 기회가 있었는데, 실제로 XTS 프로젝트가 많은 나라에서 이루어지고 있었고, XTS 기구부로 헵코모션(Hepco Motion 이하 헵코) 사의 가이드레일을 쓰는 프로젝트도 많기 때문에, 현재 헵코 사가 바쁜 상황이라는 말로 이날 로드쇼의 막을 열었다.
유 지사장은 고객과의 약속 때문에 어떤 프로젝트인지 공개를 할 수 없는 것이 많이 있고, 이 가운데는 수량이 많은 프로젝트도 있으며, 국내에서도 현재 여러 개의 XTS 프로젝트를 진행하고 있다고 말하면서, 이렇게 많은 프로젝트들이 한꺼번에 진행이 되면 납기를 어떻게 맞출까 걱정이 될 정도라고 국내시장에서 XTS의 수요 확대에 대한 자신감을 피력했다.
이어 Beckhoff 본사의 아시아지역 세일즈 매니저인 조슈아 알렉산더 러스디(Joshua Alexander Rusdy) 씨는 환영사를 통해, 현재의 제조 트렌드에 맞춰 제로 페일러(Zero Failure)를 위해 제조 분야에서도 우수한 제조설비가 있어야 하며, XTS는 이를 위해 많은 기능을 발휘할 수 있다고 서두를 열었다.
제조현장은 이미 자동화 되어있기 때문에 앞으로는 더 이상 제조현장에 사람이 상주하는 것이 아니라, 가상현실을 이용하여 현장의 모습을 지속적으로 모니터링하고 살펴볼 수 있는 것이 제조업의 미래가 될 것으로 예상된다고 말하고, 이를 위해 제조 산업에서도 다양한 기술을 채택하고 있다고 덧붙였다.
Beckhoff, 지난해 9억 1천 6백만 유로달러의 매출 올리면서 13%의 성장 구가
지난 1980년에 설립되어 내년에 40주년을 맞이하는 Beckhoff는 한국을 포함한 전 세계 75개 국가에 파트너사가 있으며, 전 세계에 걸쳐 4천3백 명의 직원이 근무하고 있는데, 이 가운데 3분의1이 엔지니어다. 지난해 9억1천6백만 유로달러의 매출을 올리면서 13%의 성장을 구가하면서 견조한 성장세를 이어가고 있다.
지난 1986년 최초의 산업용 PC를 개발한 이래, 1995년 최초로 버스 터미널 I/O를 개발한데 이어, 2003년 산업용 필드버스인 EtherCAT을 출시했다. 조슈아 매니저는 특히, EtherCAT이 표준이 되는데 기여한 한국산업계에 감사를 표한다고 피력했다.
2007년 EtherCAT 기술 그룹인 ETG가 설립됐으며, 2012년 Beckhoff 내에서 혁명적인 이정표라고 밝히고 있는 XTS가 개발됐다. 조슈아 매니저는 Beckhoff는 산업용 PC회사로, I/O와 모션 등 각종 제어를 전문으로 하는 자동화 기업이라고 설명하면서, 특히 어플리케이션에 사용되는 하나의 소프트웨어로 이런 많은 것들을 가능하게 하고 있다고 강조했다.
또, 올해 7월, 한국시장에서 그동안 Beckhoff의 대리점으로 사업을 전개해온 트라이텍이 Beckhoff Korea로서 한국지사로 전환을 했으며, 한국지사에는 대규모 물류창고가 있어서 빠른 납기가 가능하다고 밝혔다.
사용 중인 XTS, 길이 100미터 이상 무버 180개 이상인 시스템도 있어
이어서 Beckhoff 본사의 Rob Rawlyk 씨가 XTS의 기능 및 적용사례 발표와 함께, 동영상을 통한 시연을 진행했다. 다음은 Rob씨의 설명이다.
현재 전 세계적으로 XTS가 도입되고 있으며, 이를 통해서 제조현장의 많은 것들을 변화시키고 있다. 직선운동을 하는 리니어 모터는 많이 있지만, 이 리니어 모터는 항상 케이블이 필요하기 때문에, XTS는 자석을 움직이는 모터 위, 즉 무버 위에 탑재해서 모터가 트랙 위에 있는 형태로 되어있으며, 케이블이 없고 전력도 들어가지 않는다. 조립할 수 있는 다양한 모듈을 이용해서 트랙도 다양한 레이아웃이 가능하고, 트랙이 앞뒤 무한으로 움직일 수 있다. 시스템의 크기도 계속 커지고 있으며, 이에 따라 Beckhoff에서는 더 큰 컴퓨터와 더 많은 데이터 용량을 추가하고 있다.
현재 사용되고 있는 시스템 중에는 길이가 100미터 이상, 무버가 180개 이상인 시스템도 있으며, 이 무버 숫자와 트랙 길이는 점점 늘어나고 있다.
무버는 완전히 독립적이기 때문에 개별적으로 원하는 방향으로 움직일 수 있다. 독립적이라고 해서 함께 움직일 수 없다는 건 아니다. 따라서 일반적인 축을 가지고 하는 것은 무버로 할 수 있게 되고, 스스로 조율할 수 있으며, 다른 프로세스와도 조율할 수 있다.
무버는 전체 시스템에서 그 어떤 위치에서도 멈추거나, 가속하거나, 들고 있거나, 특정한 힘을 가할 수도 있다. 완벽한 제어가 가능하다. 무버에 대해서 완벽한 제어가 가능하기 때문에, 적용하는 힘도 바꿀 수 있고 제품들을 통합할 수도 있다. 또 무버 몇 개를 그루핑해서 하나처럼 움직이게 할 수 있으며, 이것을 또 분리해서 사용할 수도 있다. 또한 탑재된 기능 중에는 충돌방지 기능도 있다. 이 충돌방지 기능을 이용해서 모든 무버들이 같은 곳으로 가지만, 어느 거리 이상으로 붙지 않게 할 수도 있다. 그렇게 되면 일률적으로 라인업하게 되고, 하나의 무버가 움직이면 계속해서 따라 움직이게도 만들 수 있다. 그래서 목표지점까지 가면 거기서 새로운 명령을 할 수가 있게 된다.
XTS 시스템에는 PC가 필요하다. 그러나 이 시스템의 핵심은 모터모듈이다. 이 모터모듈은 들 수 있을 정도로 작고 가볍다. PC가 계산을 하지만, 이 모터모듈을 이용해서 무버를 움직이게 된다. 모터모듈은 위쪽에 코일이 들어가 있다. 이 코일들을 활성화해서 무버에게 얼마나 힘을 가할 지 알려주게 된다. 그리고 표면에는 센서가 들어있어서 무버의 위치를 파악하게 된다. 위치를 파악하는 정보를 이용해서 PC는 어떤 코일을 얼마나 많은 전류를 보내서 어떠한 무버에게 어떤 힘을 가할지를 명령할 수 있게 된다. 모듈 간 연결은 대단히 간단하다. 두 개의 케이블이 들어가는데, 24V 전류가 엔코더와 운영전원을 위해 들어가고, 48V는 모터 동력전원을 위한 것이다. 그래서 큰 정류기가 필요 없이 48V 전력만으로 XTS를 구동할 수 있다. 그리고 EtherCAT을 통해 모든 데이터를 빠르게 가져와서 PC에서 처리하여 제어할 수 있다.
XTS의 최대 토크는 100N이고, 정격 토크는 30N, 최대 속도는 4m/s, 가속은 10G까지 가능하다. 따라서 100N, 1kg 부하를 가지고 10G로 가속을 할 수 있다. 5kg을 이용하면 2G를 사용할 수 있게 된다. 다른 공정과 동기화한다고 하면 0.1mm까지 정밀하게 제어를 할 수 있는데, 앞으로 6개월 이내에 이 위치정확도를 절반이하로 줄일 수 있을 것으로 기대된다. 새로운 목표는 0.075mm 즉, 75마이크론이다. 이것이 동기화된 상태에서의 제어거리다. 절대 위치 정밀도는 250μm이다. 설치에 따라 다르지만, 반복위치 정밀도는 10μm 이내이다. 이는 같은 무버에게 어떤 방향으로든 같은 위치로 반복적으로 가라고 명령하면 10μm 이내에 같은 위치로 찾아갈 수 있다는 걸 의미한다. 따라서 카메라를 이용해서, 부품을 같은 위치로 움직일 수 있다는 것을 확인할 수 있다. 소비전력은 30W다. 무버의 전력소모는 무버의 속도에 따라, 얼마나 힘을 가하느냐에 따라 달라지는데, 보통은 100W로 보고 있다. 2 내지 2.5 미터 당 EtherCAT 하나를 설치한다. 그래서 피드 모듈을 사용하게 되면 다른 피드까지 모듈이 연결될 수 있다. 이렇게 함으로써 정보제공을 훨씬 더 정확하게 만들고, 48개까지의 인피드 모듈을 사용해서 최대길이를 얻어낸다.

Beckhoff 독일 본사의 Senior Application Engineer인 Rob Rawlyk 씨가 XTS의 다양한 적용사례를 소개했다.
예를 들어 몇 개의 모듈이 있고, 180도 곡선이 있다. 최대한 지름을 타이트하게 가져가게 된다. 그러면 XTS가 더 좁아질 수가 있다. 그렇지만 그 외의 사이즈도 가능하다. 예를 들어 네모 형태가 필요할 때가 있다. 네모 형태를 만들기 위해 45도 모듈을 사용한다. 45도 2개를 합하면 90도가 되고, 4개를 합하면 180도가 된다. 그리고 22 플러스 방향 22 마이너스 방향을 만들면 다양한 모양이 가능해진다. 또 일자 트랙도 가능하다. 꼭 폐쇄루프 형태가 아니어도 된다. 물론 무버가 트랙 위에 있어야 하지만 리니어 모터처럼 왔다 갔다 할 수 있다. 이것은 케이블 없이 가능하다. 직사각형도 가능하고, 동그라미도 가능하고, 타원 형태도 가능하다. 수요의 80% 정도는 타원 형태다. 네모 형태도 점점 더 많아지고는 있다. 심지어 직사각형인데 안쪽으로 트랙이 있는 형태도 많아지고 있다. 그러면 기계가 다 안에 있고 오퍼레이터 입장에서는 대단히 좁기 때문에 무버에 손이 닿지만, 기계가 안쪽으로 들어가는 형태가 많아지고 있다.
모터모듈이 있고 그 다음에는 무버를 동작시켜야 한다. 무버는 자석 플레이트와 인코더 플래그가 있어서, 자석 플레이트와 인코더 플래그의 위치만 맞는다면, 트랙시스템은 어떤 것이든 가능하다. Beckhoff 자체적으로 플라스틱 휠을 사용하는 시스템을 만들었고, 헵코의 경우에는 스틸 휠을 사용한다. 이것은 훨씬 더 부하가 높아질 수 있다. Beckhoff의 경우에는 트랙이 알루미늄으로 만들어졌다. 플라스틱 휠을 사용하고 있고, 자석 플레이트를 사용하고 있지만 어떤 소재든 가능하다.
한 번도 만들지 않은 제품들을 만들기 위한 유연한 기계, XTS가 정답
Beckhoff는 제조업체를 위해 크기를 줄이기 위해 노력을 했다. 대형 화장품 회사인 한 고객은 2030년이 되면 생산을 두 배로 늘릴 예정인데, 새로운 공장을 짓고 싶진 않기 때문에, 시스템을 작게 만드는 방법밖에 없었다. 뿐만 아니라 매년 제품 카탈로그의 30%는 신제품이다. 결국은 한 번도 만들지 않은 제품들을 위한 기계가 필요하기 때문에, 유연한 기계가 필요한데 여기에는 XTS가 바로 정답이다.
일단 전형적인 기계가 필링, 라벨링, 캡핑 등 3가지의 공정을 처리한다고 가정을 해보자. 기계들 간의 핸드오버가 발생한다. 사람이 할 수도 있고 로봇이나 일반 컨베이어를 통해 처리할 수 있는데, 첫 번째 기계에서의 제품을 두 번째 공정으로, 세 번째 공정으로 넘겨주는 일을 해야 된다. 그런데 이것을 할 때마다 만약 로봇으로 할 경우 부품이 어디 있는지는 알 수 있다. 그러나 로봇은 고가이고, 한 번에 처리할 수 있는 양이 한정되어 있다. 제거되지 않은 컨베이어라고 할 경우, 시리얼 넘버들이 다 뒤죽박죽이 될 수 있다. 그렇기 때문에 이 부분들을 다시 정리하고 무엇이 무엇인지 다시 재가공해서 다음공정으로 넘겨야 한다. 그런데 이것을 XTS 시스템을 적용할 경우, 핸드오프를 세 개간에 두 번을 하는 것이 아니라, 이송을 할 때마다 연속으로 해서 한 번에 진행이 될 수 있다.
영국에 있는 Kliklok이라는 회사는 박스를 만들어서 세우고, 안을 채우고, 봉인을 한다. 이 모든 걸 극히 좁은 설치공간에서 해낸다. 그 과정을 보면 상자가 로딩이 되고, 그 다음에 모양을 만들고, 그 다음에 무버에 올리게 되면, 무버가 박스를 받아서 다음 공정으로 넘어가게 된다. 박스 크기에 맞춰서 툴링을 가지고 있다. 박스 크기가 다르면 다른 툴링을 사용하게 되고 다른 패턴으로 해서 채울 수가 있는데, 필링을 할 때 2단 내지 3단으로 쌓을 수가 있고, 이것은 구성하기 나름이다. 그런 다음 이 시스템 밑으로 들어가면서 닫히게 된다. 반대편에서는 박스를 닫는 작업을 하고, 그런 다음에 이 기계에서 완성된 상자가 나오게 된다. 작은 XTS가 이 모든 과정을 처리했다.
XTS, 조립시스템이나 충진시스템에서 메커닉의 비중을 줄이는데 큰 역할
다음은 이스라엘의 기계다. 한 이스라엘 업체에서는 XTS를 이용해서 복수의 작업을 처리하고 있다. 로딩을 하게 되는데, 무버는 전기가 연결되어 있지 않기 때문에 수동으로 파트를 잡고 있어야 되는데 2개는 필요하지 않다. 하나만 있으면 된다. 병을 하나씩 로딩하고 여기에 오픈이라고 써있는 플렌저를 놓으면 용수철에 의해서 이것이 닫히게 된다. 그런 다음 병을 웨잉스테이션으로 넘기게 된다. 웨잉스테이션은 무게를 재는 것인데, 병이 비어있는지의 여부를 확인해야 되기 때문이다. 병의 무게를 재는 웨잉스테이션으로 이동을 해서, 각각 개별 병의 무게를 신속하게 측정하게 되는데, 충진하는 시간이 오래 걸린다. 두 개씩 충진한 다음에, 다음 스테이션에서 높이를 측정하게 되는데, 이건 하나만 있으면 된다. 다음 스테이션에서는 캡핑 작업을 하게 되는데, 이것도 하나만 있으면 된다. 이 기계는 이전에 로터리테이블 형태였었기 때문에, 로드가 2개 필요하고 무게측정 스테이션 2개, 필링 스테이션 2개, 검사스테이션 2개, 캡핑 스테이션 두 개가 필요했을 것이다.
이 고객사는 캡핑, 레벨 체크, 무게 측정 스테이션, 로드 스테이션을 다 하나씩 빼고, 이렇게 해당되는 제거를 함으로써 XTS 구매 가격을 커버하고도 남았다고 한다. 비용을 낮추면서도 공간을 훨씬 절약하고 보다 유연하게 제어를 구현한 고객 사례다.
이들이 XTS의 핵심 용도다. 조립시스템, 충진시스템 이런 쪽에서 XTS가 큰 빛을 발휘할 수 있다. 이처럼 XTS는 메카닉의 비중을 많이 줄일 수 있다.
제품을 바꿀 때는 무버에 있는 툴만 교체하면 돼
또 다른 사례는 모짜렐라 치즈를 봉지에 담는 작업을 하는 것이었는데, 이 고객은 XTS를 사용해서 기계의 길이를 8미터나 줄일 수 있었고, 분당 80패키지에서 240개의 패키지를 처리할 수 있게 됐다. 그러나 이보다 고객이 흥미를 가졌던 것은, 이 기계는 패키징을 닫고 무빙을 계속 하면서 연간 5천 유로달러의 전기세가 수반이 되는 살균처리 스테이션을 건너뛸 수 있었을 뿐만 아니라, 유효기간도 과거보다 2주나 연장할 수 있었다. 2주나 유효기간을 연장할 수 있게 됨으로써, 1천 킬로미터나 더 떨어진 곳에까지도 제품을 공급할 수 있어서 시장을 크게 확대시킬 수 있게 된 것이다. 이 고객은 이것이 정말 좋았다고 얘기를 하고 있다.
다음은 덴마크의 서벤토 그룹이다. 이 회사는 의료용 인헤일러와 자동 인젝터를 만들고 있다. 이 시스템의 핵심은 바로 XTS다. XTS를 사용해서 원하는 방식으로 스테이션을 만들 수 있다. 집는 위치도, 내려놓는 위치도, 부품의 종류도 다양하게 사용할 수 있다. 이 회사는 XTB머신이라는 이름으로 광고를 하고 있는데, XTS가 시스템의 핵심이라고 얘기를 하고 있다. 제품을 바꿀 때는 무버에 있는 툴만 교체하면 된다. 그리고 시스템은 원하는 만큼 길게 연장할 수 있다. 얼마든지 유연하게 부품을 추가할 수 있다고 광고를 하고 있다. 이 기계는 지난 5년 동안 사용이 되고 있는데, 예를 들어 2개의 스테이션을 추가하거나 2미터의 길이 연장을 원하면 얼마든지 가능하다. 모든 것이 모듈형태이기 때문이다. 그러면서도 완전히 새로운 어플리케이션을 보여줄 수 있다.
오레오 공장, 버튼 하나로 포장 숫자 변경
다음은 폴란드의 오레오 공장이다. 오레오는 오늘날 아이스크림에도 들어가고 다른 것에도 들어간다. 쿠키 자체를 먹는 것보다 다양한 재료로 사용이 되고 있는 것이다. 일반적인 오레오는 평평하게 생겼다. 그러나 더 얇게 만들기도 하고, 두껍게 만들기도 하고, 민트도 들어간다. 이런 다양한 맛이 생겨나고 있기 때문에, 한 사이즈에서 다른 사이즈로 전환이 될 수 있어야 한다. 예를 들어서 포장에 보통 10개씩 들어가는데, 프로모션으로 플러스 2를 해서 12개씩 넣어준다든지 숫자가 달라지기도 하고, 오레오를 여러 개 합친 것을 슬러그라고 하는데, 오레오를 슬러그 형태로 만들어주기도 한다. 이것이 수직으로 되어 있는 것을 라인으로 내려 보내야 하는데 이때 XTS를 이용하게 된다. 앞쪽의 무버와 뒤쪽의 무버를 같이 사용해서 슬러그를 집는다. 그런데 오레오 안에 필링이 두 배로 들어가는 경우에는 크래커가 얇기 때문에 잘 제어가 되지 않으면 쿠키가 계속 깨지는 일이 있어서 이 회사에게는 이것이 오랫동안 큰 어려움이었다. XTS를 사용해서 뒤쪽의 무버를 동기화 시켜서 위치를 잘 잡아서 다음 시스템까지 안전하게 이송을 시켜준다.
그리고 포장으로 들어가게 된다. 열 개씩 포장을 하거나 열두 개씩 포장을 하거나 소비자가 원하는 대로 쉽게 포장을 할 수 있게 된다. 기계를 바꾸는 것이 아니고 버튼 하나만 누르면 전환이 가능하다.
XTS를 3개로 쌓아올려 그룹으로 운전
또 다른 사례다. 이 고객은 50mm 폭의 무버를 어떻게 조금 더 가까이 위치시킬 수 있을 것인가에 대해 생각하다가, 사실상 무버의 크기는 기계적으로 더 소형이 될 수 없는 상황이었고, 대신 XTS를 스태킹하는 방법을 생각했다. 3개를 합해서 쌓아올리는 형태로, 그룹으로 해서 같이 운전을 하는 것이다. 컴퓨터에서는 이것이 다 한 트랙 상에 있다고 인지를 한다. XTS이기 때문에 이것이 가능한 것이다. 무버를 위에다 쌓을 수 있다. 그러면 공간을 훨씬 절약할 수 있다. 그럼에도 불구하고 완전한 제어가 가능하다. 크기에 따라서 공이 아래로 떨어졌을 때 무버를 열고 그런 다음에 무버를 함께 합치게 된다. 그렇게 하면서 어느 정도 힘이 가해지는지를 모니터링한다. 그러니까 한 무버에는 힘을 덜 가하게 함으로써 다음 무버로까지 이동을 하게 하지만, 어느 정도까지 힘을 가할 수 있는지는 제한을 하게 된다. 그렇게 되면 그 무버가 어떻게든 공을 넘기려고 하겠지만 공이 닿을 때 공이 막고 있을 것이고, 그렇게 되면 멈출 수밖에 없다. 그렇게 되면 무버 간의 거리를 측정해서 이것이 흰색공인지 노란색공인지를 파악할 수 있다. 그래서 그 거리를 측정을 하고, 그 외에도 여러 가지 기계적으로 풀어야 되는 부분도 있었다. 노란색 같은 경우에는 작아서 두 개가 같이 끼는 경우도 있었다. 두 개가 같이 내려오는 경우가 있는데 테스트를 해서 갭을 통과할 수 있는지 보고, 통과하지 못한다면 다시 백 시키게 되고, 그런 다음 디커플링을 해서 공을 보내게 된다. 그래서 무버가 어느 정도의 곡선구간에서도 특정구간을 유지하는 건 가능한데 수학적으로 처리를 해야 된다. 뒤의 무버가 앞 무버를 추월하고 싶지만 힘을 제한을 하고, 이렇게 한다면 곡선구간에서도 하나가 앞질러 나가는 일이 발생하지 않는다. 그리고 이쯤에서 갔을 때 무버를 분리해서 공을 윌릿을 시키고, 다시 넘어가서 큐잉작업을 하게 된다. 때에 따라서 뒤쪽에 있는 공들이 다 모이게 된다. 그리고 좌측에 있는 무버를 갖고 앞뒤로 빠르게 움직이게 한다면 진동이 발생해서 공들이 다시 하나씩 통과해서 떨어지게 된다.
XTS, 전 세계적으로 800대 이상 가동 중

헵코모션코리아 황승용 지사장이 XTS Hepco 가이드 시스템인 ‘GFX’에 대해 소개하고 있다.
XTS는 이미 800대가 넘는 시스템이 가동 중이다. 6킬로미터에 달하는 XTS가 현재 설치되어 있다. 250mm밖에 되지 않는 모듈이 이렇게 6킬로미터 이상이나 설치됐다는 점은 대단히 많이 설치가 되어있다는 것이고, Beckhoff에서는 많은 툴들을 개발했기 때문에 고객들은 훨씬 일하기가 쉽다.
모든 진단 툴들을 구축을 해놨기 때문에, 마찰이 올라가면 왜 마찰이 올라가는지 파악을 할 수가 있다. 진단 툴이 있기 때문에 즉각적으로 문제를 파악할 수가 있고, XTS 설계라든지 정렬을 제대로 할 수가 있고, 무버 구성이라든지 심지어는 뷰어가 있기 때문에 상황파악도 훨씬 용이하다. 기계를 노트북에서 구성을 해서 가상에서 테스트를 한 다음에 실제로 운전을 한다. 사전에 해보고 잘 돌아가는지 파악을 한 다음에, 기계가 마련이 되면 시뮬레이션 모드에서 정상운전으로 전환만 하고, 같은 소프트웨어로 돌리기만 하면 된다.
XTS의 미래
원으로 가는 것도 좋고 앞뒤로 가는 것도 좋지만, 다른 가능성도 있다. Beckhoff에서는 현재 트랙 관리를 위해 노력하고 있다. 트랙을 단순히 변경하는 것이 아니라, 기계적으로 옮기는 것이다. 모듈이 피스 당 2kg 정도기 때문에, 기계적으로 움직이게 되면 원으로 돌아가서 곡선구간을 타는 것이 아니라, 엘리베이터 형태를 이용하면 훨씬 더 좁은 공간을 사용할 수 있다. 이것을 요청했던 고객사는 4개의 XTS가 앞으로 가고 하나의 XTS가 들어오는데, 100미터짜리 구간이 필요하기 때문에 500미터를 다 사용하기 보다는 100미터를 이렇게 다섯 개를 두게 되면 훨씬 더 공간을 효율적으로 사용할 수 있게 된다. 오퍼레이터가 들어와서 파트와 상호작용할 수 있는 구역도 만들 수 있고, 기계적으로 할 수 있다면 XTS 트랙으로도 할 수가 있다. 모터모듈을 로봇 양쪽에 탑재를 해서 로봇을 운전해서 연결을 시키는 것도 가능하다.
또 다른 사례다. 모듈 사이에 엘리베이터가 있다. 트랙사이의 엘리베이터라고도 할 수 있다. 그러면 무버가 트랙을 왔다 갔다 할 수가 있게 된다. 이 엘리베이터는 일상적인 XTS로 움직이는 부분도 고정되어있는 부분과 같은 기능을 할 수가 있게 된다. 그래서 일반적인 XTS로 할 수 있는 것은 엘리베이터 구간에서도 그대로 할 수가 있다. 무버를 트랙 안에 스태킹해서 운반할 수도 있다. 툴도 바꿀 수가 있다. 예를 들어서 한쪽에 무버가 있어서 툴을 바꾸고, 또 시스템 안으로 들어왔다가 나갔다가 할 수가 있다. 이것은 Beckhoff가 작년에 독일 전시회에서 선보였던 사례다.

Beckhoff Korea 정명오 부장은 TwinCAT Vision은 비전 솔루션을 TwinCAT 내에 통합해서, 모션과 I/O, XTS와 동기화해서 사용할 수 있다는 장점을 가지고 있다고 강조했다.
현재 고객사와 진행하고 있는 프로젝트가 있는데, 고객사도 분당 1천 파트 이상의 고속시스템을 갖고 있는데 변동이 많은 제품이다. 예를 들어서 76mm 길이인 제품도 있다가 300mm까지 늘려야 하는 경우도 있다. 76mm 같은 경우에는 무버의 숫자가 더 늘어나야 하는데, 300mm의 경우에는 무버의 숫자가 너무 많으면 더 이상 원활하게 움직이지 않기 때문에, 기계적 메커니즘을 도입해서 무버들을 넣었다가 뺐다가 또 뺀 것을 저장했다가 다시 넣었다가 할 수 있는 시스템을 마련했다. 그래서 파트의 길이가 길어지면 무버를 몇 개를 뺐다가 76미리로 줄어들게 되면 다시 넣었다가 이런 것을 수동으로도 할 수 있지만, XTS를 이용해서 바꿀 수 있도록 하고 있다. 이것이 XTS의 미래다.
Rob 씨에 이어 헵코모션코리아 황승용 지사장이 헵코모션 및 XTS Hepco 가이드 시스템인 ‘GFX’ 에 대한 발표를 진행했다.
헵코모션은 자동화시스템 및 부품제조 엔지니어링사로서, 1969년에 설립되어, 올해로 50주년을 맞이했다. 매년 6만 키로 이상의 트랙시스템을 생산해서 판매하고 있다. 직선, 원형, 회전연속운동 트랙시스템을 생산하고 있고, 이러한 시스템을 통해서 자동화 시스템, 조립생산 프로세스를 통해서 구성요소 부품을 이송하는데 사용한다.
63개국에 수출을 하고 있으며, 75% 이상을 해외에 수출판매하고 있다. 국내에서는 자동차, 자동화, 공작기계, 전자 등 모든 산업분야에 헵코모션이 적용되고 있다.
헵코모션은 직선운동이나 곡선운동, 원형회전운동 등 모든 것을 V가이드 원리에 기반해 생산을 하고 있다.
V가이드 기술의 특징은 이물질을 밀어내는 셀프크리닝과 자동급유시스템을 장착할 수 있고, 어떤 유격이 있었을 때 조정을 통해서 재세팅이 가능한 편심기능이 있으며, 랙을 부착할 수 있어서 랙 구동 시스템도 가능한 옵션이 있다는 점이다.
Beckhoff XTS Hepco 가이드 시스템 ‘GFX’, 슬라이드 레일 자체가 열처리 연마
헵코모션은 7년 전 Beckhoff와 파트너십을 체결했는데, GFX는 Beckhoff의 고하중 및 고정밀 XTS 어플리케이션을 위해 강력한 내구성과 정밀도가 있는 가이던스(Guidenc) 시스템을 제공하기 위해 출시됐다.
헵코모션의 가이드 시스템들은 Beckhoff 모터 모듈, 무버 자석 및 무버 인코더 플래그와 함께 완전히 조립된 상태로 또는 부분 조립된 상태나 컴포넌트 키트로 공급이 된다.
GFX는 고정밀의 XTS의 정밀도를 보증하기 위한 시스템이기 때문에, 가이드적인 측면에 중점을 뒀다. 슬라이드 레일 자체가 열처리 연마가 되어있어서 내구성과 정밀도가 뛰어나다. AISI 52100 고품질의 베어링강으로 제작되며, 스테인리스 스틸 옵션이 가능하다.
V 표면경도는 58~62 Rockwell C scale이며, 레일 폭은44mm이다. 베어링도 70도의 각도를 가지고 있고, GFX는 25파이부터 34파이 베어링을 채용하고 있다. 헵코모션은 직선구동에서 13파이 베어링부터 150파이 베어링까지 커버를 하고 있다.
어플리케이션에 따라서 베어링이 3개인 3베어링 무버가 있으며, 베어링 4개를 채용한 4베어링 무버가 있는데, 34파이 베어링 네 개를 사용했을 때 75키로 이상 이송이 가능하다. 가압물에 제한이 있을 경우에, 자체 베어링과 가이드 컨셉으로 초당 10미터까지 구동이 가능하다.
헵코의 큰 장점은 한쪽이 고정형 베어링이고 반대는 편심형으로 되어있어서, 어떤 유격이 발생했을 때 추가적으로 세팅을 통해서 후에 문제없이 재구동이 가능하다는 것이다.
헵코의 GV3는 편심조정이 가능해 기계의 총 수명 연장
LM가이드의 경우에는 장기간 사용으로 인해 볼 레일 블록과 레일 사이에 마모현상이 생기기 시작하면, 문제를 해결해줄 특별한 장치가 없기 때문에 시스템을 모두 폐기하고 교체해야 한다. 그러나 헵코의 GV3는 편심조정이 가능한 시스템으로 기계의 총수명이 연장되어 비용면에서도 매우 효율적이다.
특히 LM가이드는 윤활이 매우 중요한데, 어플리케이션에 따라 블리드 윤활(Bleed Lubrication) 시스템이라고 하는 자동급유시스템이 가능하며, GFX에는 자동급유시스템이 옵션이 아닌 표준으로 공급된다. 레일 자체의 가공을 통해, 자동펌프를 통해 시스템적으로 윤활을 하고 있다. 그리고 베어링 자체는 내부에 그리스 충진되어 윤활을 하기 때문에 재급유가 필요 없다.
또, 식품이나 의료 세척분야에 응용될 수 있는 스페셜 XTS 가이드는 스테인리스 스틸 랙 및 무버 어셈블리를 사용할 수 있다. 고객요청에 따라서 식품등급의 그리스 제공도 가능하다.
1-Trak Lite Guidance System, 100개의 무버로, 최대 50미터 길이까지 만들 수 있어
1-Trak Lite 시스템은 100개의 무버로, 최대 길이 50미터까지 만들 수 있다. 모터 장착 구조로 30mm 두께의 알루미늄 케이스에 장착된 완벽한 시스템으로 제공된다. GFX는 XTS의 가이드이기 때문에, 모든 디테일한 어플리케이션은 영국 본사와 독일 Beckhoff 본사가 협업을 해서 많은 어플리케이션을 취급하고 있다. 유지보수도 대단히 편리하다. 장기간 사용에 의해 변형, 파손이나 베어링 유격이 발생했을 때, 전체 유지보수용 섹션이 있어서 레일만 제거를 하면 쉽게 무버를 탈부착할 수 있고, 후에 재세팅으로 다시 조절하면 된다.
GFX는 헵코의 1트랙과 PRT2 정밀 링 가이드 시스템을 함께 사용하고 있다.
1-Trak Lite Guidance System의 경우에는 100개의 무버로 최대 50미터까지 만들 수가 있고, 이 부분은 증감이 가능하다. 기본 37의 알루미늄 플레이트 베이스의 V가이드 모터브라켓, 리니어 모터, 무버로 구성된다. 풀 패키지로 조립을 해서 납품을 하고 있다.
1-Trak Lite는 Beckhoff 모듈 자체가 Clothoid 형상이기 때문에 링 자체도 Clothoid 형상으로 제작이 되고, 이 형상을 넘어가기 위해서 3개의 무버가 제공이 된다는 것이 큰 특징이다.
GFX PRT2 가이드 시스템, 4개의 베어링 무버 사용
PRT2는 헵코의 표준제품이고 매년 150세트 이상의 트랙시스템을 국내에서 공급하고 있다. Beckhoff XTS용 가이드 시스템은 PRT2 링 및 트랙 조립체로 공급될 수 있으며, PRT2 시스템은 4개의 베어링 고정센터캐리지(FCC) 무버를 요구한다.
세그먼트는 원호모양이어서 클로소이드 형상은 아니고 4개의 베어링 무버를 사용하고 있다. 4개의 베어링 무버는 3개의 베어링 무버보다 하중이 크고 내구성이 강하다. 또한 기계적인 특성도 강하다. 어플리케이션에 따라서 타원형이 가능하고 45도 모듈을 사용해서 사각타입도 가능하다. PRT2 시스템도 마찬가지로 베이스, 모터, 슬라이드, 무버, 모터 브라켓, 리니어모터 풀세트로 제공을 하고 있다. 다양한 어플리케이션을 맞추기 위해서 다양한 형상으로 제작을 하고 있다.
GFX는 여러 가지 자동화라인에 적합한 구성이 가능하다. Beckhoff의 25도와 45도 모듈을 사용한 다양한 레이아웃과 모양으로 구성할 수 있다. Beckhoff의 리니어모터 구현이 가능하면 헵코에서도 이 형상으로 가이드가 가능하다.
4차산업혁명 시대에는 로봇과 GFX, XTS가 코웍하는 자동화시스템이 트렌드가 될 것
GFX시스템은 Beckhoff 모터에 크게 좌우된다. 기본 GFX를 사용하게 되면 최대 4m/s의 속도를 달성할 수 있고, Beckhoff의 리니어 모터는 각 구간마다 속도조절이 가능하기 때문에, 곡선부는 속도를 줄여줄 수 있어서 총 수명 연장에 도움을 준다.
GFX를 사용하면 초당 40미터의 최대 가속도를 달성할 수 있고, 가속을 낮게 했을 때 시스템의 수명을 연장할 수 있다. 또한 가감속이 매우 클 때 무버를 특수하게 경량화하게 되면 관성이 낮아지기 때문에, 쉽게 더 가속할 수가 있다. GFX는 0.5키로에서 5키로까지 커버하고 있고, 현재까지 8키로까지 적용한 사례가 있다. 국내에서는 7키로까지 적용한 사례가 있다. XTS의 반복위치정밀도는 10마이크로까지 가능하다.
스토브리 로봇과 GFX가 코웍한 동영상이 소개됐다. 헵코에서는 4차산업혁명 시대에는 로봇과 GFX, XTS가 코웍하는 자동화시스템이 트렌드가 될 것으로 내다보고 있다.
이와 함께 파워시그널이라는 네덜란드 업체가 XTS를 사용해서 쿠키를 생산하는 영상과, 2017년 국내 처음으로 Beckhoff Korea와 헵코모션 코리아가 협업해서 GFX와 XTS를 조립한 후 테스트한 XTS GFX 가이드 어셈블리 영상이 소개됐다.
TwinCAT 내에 비전 알고리즘을 적용할 수 있도록 비전 솔루션이 통합된 TwinCAT 3 Vision
이어서 Beckhoff Korea 정명오 부장이 TwinCAT Vision을 주제로 한 발표를 진행했다. 정 부장은 비전은 크게 컴퓨터비전과 머신비전으로 나뉘는데, 1980년대부터 자동화분야에서 많은 기술력과 노하우를 가지고 있는 Beckhoff는, 머신비전을 베이스로 한 비전솔루션을 출시했다고 말했다. 다음은 정 부장의 발표 내용이다.
과거 장비의 전반적인 운영은 TwinCAT이 제어하고, 비전은 독립적인 비전 컨트롤을 통해서 처리를 해왔는데, 이기종간의 인터페이스다 보니까 이 과정에서 여러 가지 문제점들이 있었다.
이미지 처리 및 제어 어플리케이션 간의 통신 문제가 발생할 수 있고, 서로 다른 밴더에서 제공하는 제품이다 보니까 시스템 구성에서 문제가 발생할 수 있다. 또한 다른 밴더들에서 제공하는 것이기 때문에 유지보수 문제가 발생할 수 있다. 그리고 TwinCAT이 사용되는 PC에 비전 컨트롤러를 설치해서 사용하는 경우, 비전 컨트롤러와 TwinCAT이 서로 협업해서 동작할 수 있도록 설계되어 있지 않기 때문에 안전성 문제가 발생할 수 있다.
Beckhoff에서는 이런 여러 가지 문제들을 감안해서 비전 솔루션을 제공하고 있는데, 비전솔루션은 TwinCAT 내에 비전 알고리즘을 적용할 수 있도록 내부에 통합 되어있다. 즉 외부에 다른 디바이스 없이도 PLC 프로그램으로 비전 알고리즘을 쉽게 구현할 수 있다. 따라서 비전 전문가가 아닌 일반 PLC 유저들이 TwinCAT에서 제공하는 PLC 언어를 이용해서 쉽게 비전 알고리즘을 디자인할 수 있다.
TwinCAT Vision, TwinCAT이 제공하는 550개가 넘는 PLC 펑션 이용

XTS 데모
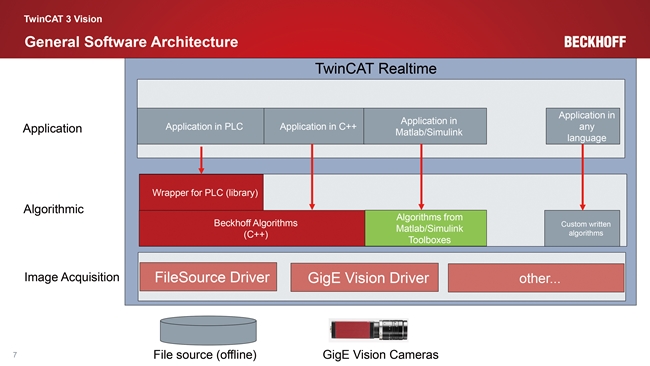
TwinCAT Vision 아키텍처는 크게 3가지 레이어로 되어 있다. 어플리케이션 레이어는 PLC 프로그램을 가지고 운영하는 PLC 코딩 영역이며, 알고리즘 레이어는 Beckhoff에서 제공하는 비전관련 알고리즘을 제공하는 영역이고, 이미지 수집 레이어는 비전 드라이버를 제공하는 영역이다.
현재 비전 드라이버로서 GigE 드라이버가 나와 있다. 따라서 시중에서 판매하는 공통사양의 GigE Vision을 가지고 있으면 어떤 것이든 TwinCAT에 접목해서 사용할 수 있다. 취득한 영상의 데이터는 GigE 드라이버를 통해서 Beckhoff에서 제공하는 알고리즘을 이용한다. 이 알고리즘은 PLC 언어로 맵핑이 돼서 사용되고 있다. PLC 언어를 이용해서 라이브러리에 있는 펑션을 호출하면 쉽게 비전기능을 사용할 수 있다. 현재까지는 PLC만을 위해서 나와 있고, 만약에 비전카메라가 없거나 현장이 아니라고 하더라도 현장에서 촬영한 데이터를 이용해서 파일소스 드라이버를 이용하게 되면 기존에 촬영했던 파일이나 영상을 가지고 와서 실제 상황실에서도 알고리즘 구현을 할 수 있는 기반을 제공하고 있다. 그리고 현재까지는 PLC 언어만을 사용할 수 있지만, 향후에는 C++언어의 TwinCAT C++모듈을 이용해서도 비전 알고리즘을 구현할 수 있게 할 계획이다. 매스웍스 사의 매트랩에서 제공하는 알고리즘 또한 통합해서 사용할 수 있고, 고객이 직접 개발한 알고리즘까지 통합해서 사용할 수 있는 환경을 제공하고 있다.
현재까지 PLC에서는 550개가 넘는 펑션을 제공하고 있으며, 이러한 펑션들은 쉽게 사용할 수 있게 하기 위해서 라이브러리로 제공이 되고 있다.
취득할 영상을 담아놓을 컨테이너 부분과 결과물을 보여줄 디스플레이 부분, 영상처리에 대한 펑션들, 이렇게 간단한 3가지 구성요소만을 가지고 쉽게 영상결과물을 취득할 수 있다. 그리고 이 프로젝트가 어떤 GigE 드라이버를 하는지 GigE 드라이버를 가지고 선택만 하면 실제 드라이버를 통해서 영상 드라이버가 PLC로 전송이 되고, PLC에 있는 PLC 프로그램을 이용해서 결과물을 볼 수 있다. 이 부분은 TwinCAT 프로그램 내에 포함된 ADS 이미지 뷰어라는 프로그램인데, 이 프로그램을 이용하게 되면 고객이 촬영한 영상데이터, 결과물까지도 확인해 가면서 PLC 프로그램을 디버깅하고 이미지 알고리즘을 제작할 수 있다.
TwinCAT 3 Vision은 쉽게 프로그램할 수 있을 뿐만 아니라, 카메라 구성도 간단하다. GigE Vision 드라이브를 통합하기 위해서 마치 EtherCAT 같이 스캔만 하게 되면 GigE Vision 드라이브를 감지해서 바로 추가할 수 있다. 그리고 GigE Vision 같은 경우에는 어떤 파라미터든지 TwinCAT 내부에서 파라미터를 조절해서 파라미터를 설정할 수 있다.
스캔하면 GigE Vision을 찾게 되고, 찾은 GigE Vision을 드라이버 영역으로 가져와서 이미지 정보들을 볼 수 있다.
실제 비전 프로그램을 하다보면 가장 중요한 부분은 성능이다. 고객이 구현하고자 하는 어플리케이션에 밴더 사에서 얼마나 쉬운 펑션들을 제공해서 한 번에 해결할 수 있는가 하는 부분도 중요한 요소다. 그리고 비전 컨트롤러에서 제공하는 트리거 기능과 비전 캡처, 트리거를 싱크를 맞춰서 하는 액션들이 제공되느냐 하는 이 3 가지 요소 또한 중요하다.
TwinCAT에서는 코어를 활용한 분산제어로 CPU 비전의 퍼포먼스를 높일 수 있는 기능 제공
우선 TwinCAT Vision의 성능 측면이다. 비전 성능을 높이기 위해 현재, 그래픽 카드의 성능을 높여서 하드웨어적으로 비전 성능을 높이는 방법과, 소프트웨어적인 방식으로 높이는 방법, 이 두 가지가 일반적으로 사용되고 있는데, 하드웨어 방식의 경우에는 그래픽카드가 상업용으로 나와 있질 않다. 있다고 해도 고가여서 채택하기가 쉽지 않다. 소프트웨어 방식의 경우에는 알고리즘을 병렬처리 한다든지 하는 방법을 통해서 비전의 성능을 높일 수 있는데, TwinCAT의 경우에는 비용이 많이 발생하는 그래픽카드의 GPU를 사용하지 않고도, TwinCAT 자체의 기능만으로 이미지 인지 때 병렬처리를 해서 원하는 이미지의 결과물을 좀 더 빠르게 취득할 수 있는 기능을 제공하고 있다.
TwinCAT 3 Vision 아키텍처
바로 멀티코어시스템인데, TwinCAT Vision 비전뿐만 아니라, TwinCAT Vision이 베이스로 하고 있는 TwinCAT 3는 멀티코어를 사용할 수 있다. 코어별로 해서 태스크를 부여할 수 있다. 예를 들어서 모션을 한다고 했을 때 모션과 I/O, PLC, 이 세 개의 태스크가 있다고 했을 때, 첫 번째 태스크는 모션, 두 번째는 I/O, 세 번째는 PLC 이렇게 코어별로 태스크를 할당할 수 있다. 즉 분산제어를 할 수 있다. 이렇게 되면 첫 번째 코어에서만 부하가 높은 것이 아니라, 균등하게 부하를 전체 시스템에서 맞추는 효과를 얻을 수 있다.
비전시스템에서는 코어별로 할당하는 것이 아니고, 갑자기 부하가 많이 발생하는 이런 태스크의 경우에는 잡 태스크(Job Task)를 이용한다. 잡 태스크란 어떤 부하요소가 있을 때 그걸 스레드 처리를 해서 병렬로 처리를 하는 것이다. 그렇게 되면 이미지 프로세싱 전에 작업한 이런 프로세싱들이 얼마나 복잡한가, 얼마나 시간이 많이 걸리느냐에 따라서 몇 가지 잡들로 분산을 한다. 그러한 잡들은 해당 코어에서 할당이 되고, 이런 것들은 서로 결과물을 취합해서 하나의 결과물로 받을 수가 있다. TwinCAT에서는 코어를 활용한 분산제어로 이런 CPU 비전의 퍼포먼스를 높일 수 있는 기능을 제공하고 있다.
이와 함께 비전에서 쉽게 어플리케이션을 적용할 수 있도록 얼마만큼 펑션을 제공하느냐 하는 점도 관건이다. 고객이 원하는 어플리케이션에 10개나 20개가 넘는 펑션들을 조합해서 하나의 결과물이 나온다고 하면 그 과정도 힘들다. 그러나 밴더에서 제공하는 하나의 펑션만을 이용해서 쉽게 어플리케이션의 결과물을 취득할 수 있다면 상당히 좋은 솔루션이라고 할 수 있다.
Beckhoff의 비전 솔루션은 일반적으로 많이 사용하는 패턴을 찾는 어플리케이션부터, 위치와 각도를 찾는 어플리케이션, 그리고 측정, ID인식과 같은 어플리케이션들의 결과물을 간단하게 취출해주는 펑션들을 제공하고 있다.
가장 흔히 사용하는 게 검출인데, 일반적으로 검출을 사용하게 되면 패스된 슬러셧값을 가지고 물체를 인식하거나, 아니면 범위를 정해서 물체를 인식하는 방식, 사이즈나 영역을 이용해 찾는 방식 여러 가지 방식을 제공하고 있다.
그리고 인지의 경우에는 윤곽 매칭방식과 패턴의 방향을 찾는 이런 알고리즘을 통해서 쉽게 오피스를 매칭할 수 있는 기능을 제공하고 있고, 원의 중심을 찾는 알고리즘, 호의 각도나 시작매치를 찾는 어플리케이션, 엣지를 찾는 어플리케이션, 오브젝트의 각도를 찾는 어플리케이션, 이런 것들을 조합한 어플리케이션까지 다양한 어플리케이션을 제공하고 있다. 그리고 이진화된 바코드, 데이터별 케이스나 QR코드를 한 번에 읽을 수 있는 펑션들도 제공하고 있다.
그리고 Beckhoff의 I/O중에 LED에 관련된 몇 가지 I/O가 있다. I/O들의 기능을 원하는 커런트를 내보내서 빛 광원이 가능한 E-2590, E-2595-0010이다. E-2595는 24볼트에 3암페어까지 출력이 가능하고, E-2595-0010은 48볼트에 3암페어까지 출력이 가능하다. 이러한 제품을 이용할 경우에는 비전과 I/O가 EtherCAT으로 동기화되어 출력이 가능하다. 이렇게 네트워크 컨트롤에서 원하는 출력량을 제어하게 되면, 발열량도 적어지고 에너지 소비도 적어지게 된다. 그리고 무엇보다도 수명이 길어지는 효과가 있다.
시중에 나와 있는 앰프는 가격이 상당히 고가다. Beckhoff의 경우는 50만 원 정도인데, 유용하게 사용할 만한 제품은 100만 원 정도의 가격대에 판매가 되고 있다. 이런 부분 역시 상당한 이점이다.
C6930이라는 Beckhoff의 PC는 4개 정도의 비전카메라를 사용할 수 있다. 별도의 외부 디바이스 없이도 GigE 카메라라면 네트워크를 통해서 인터페이스할 수 있고, 여기에 관련된 트리거 조명의 경우에도 E-2595를 통해서 트리거 신호를 내보내서, 카메라와 싱크를 맞춰서 동작할 수 있다. 즉 구성이 아주 간단해진다.
TwinCAT Vision은 소프트웨어인 GigE Vision과 Beckhoff의 PC, LED 스트로브를 컨트롤할 수 있는 모듈, 이렇게 3가지로 구성이 된다. GigE Vision의 라이선스는 몇 개의 GigE Vision하고 인터페이스할 것인가, 어떤 펑션을 사용할 것인가에 따라 두 가지로 나뉜다.
정 부장은 발표를 마무리하면서, TwinCAT Vision은 Beckhoff의 최신 Vision 솔루션으로, 다른 디바이스 없이 TwinCAT과 자동화된 모션 솔루션, I/O와 동기화돼서 비전처리를 할 수 있다고 말했다. 또, 다른 비전 업체는 PLC와 비전을 인터페이스하기 위해서는 네트워크로 할 수밖에 없는데, TwinCAT Vision은 비전 솔루션을 TwinCAT 내에 통합해서 모션과 I/O, XTS와 동기화해서 사용할 수 있는 큰 장점을 지니고 있다고 역설했다.


![[인터배터리 2024] (주)성신콤프레샤, 급수식 콤프레샤 공개](https://file.yeogie.com/img.news/202403/md/KkJsfjPPC9.jpg)
![[인터배터리 2024] 해성마그네트, 2차전지 원료 고자력 전자석 탈철기 소개!](https://file.yeogie.com/img.news/202403/md/2zwxE8tmb8.jpg)
![[인터배터리 2024] 덕산코트랜, 공냉식 냉각기 전시로 자사의 기술력 알린다](https://file.yeogie.com/img.news/202403/md/D69tWhdHdP.jpg)


![[KOPLAS 2023 Review] 플라스틱의 지속 가능한 미래를 위한 키워드, ‘친환경’과 ‘탄소중립’①](https://file.yeogie.com/img.news/202303/md/jdyPATuPF3.jpg)


![[KOPLAS 2023 Review] 플라스틱의 지속 가능한 미래를 위한 키워드, ‘친환경’과 ‘탄소중립’②](https://file.yeogie.com/img.news/202303/md/g1RLHJrJp5.jpg)