

정교한 헤어핀 기계의 개발에서 긴밀한 팀워크를 보여준 두 회사의 직원들(좌측에서 우측 방향) Tilman Plaß, Darius Wala(Beckhoff 소속), Oliver Schernau, Fabian Glöckler(GROB 소속), Karsten Schätzle(Beckhoff), Thomas Thurnhuber, Daniel Gugenberger, Florian Pichler(GROB 소속), Florian Schütt(Beckhoff), Martin Ellenrieder, Andreas Reißer, Thomas Greißel(GROB 소속). © Beckhoff
공작기계 제조업체인 GROB는 전기 모빌리티 산업에서의 점점 다양해지는 중대한 요구사항을 충족할 대규모 제조 및 조립 시스템을 만들고 있다. 이를 가능하게 한 것은 Beckhoff의 PC 및 EtherCAT 기반 제어와 구동 기술로 구현된 최소 사이클 타임과 이에 상응하는 빠른 프로세스 시퀀스라고 해도 과언이 아니다. 전기 모터의 스테이터 와인딩 림(winding rim)을 형성하는 정교한 헤어핀 생산 기계에서 최적으로 확장된 자동화 솔루션의 이점을 확인할 수 있다. 이 기계는 중앙 제어 플랫폼 역할을 하는 TwinCAT 3가 탑재된 초소형 산업용 PC C603x와 XTS 이송 시스템이 적용됐다.
독일 민델하임 지역에 위치한 글로벌 기업인 GROB-Werke GmbH & Co. KG는 95년 이상 주요 자동차 제조업체 및 그들의 공급업체를 위한 시스템과 공작기계를 개발해 왔다. 포트폴리오는 범용 머시닝 센터에서 매우 복잡한 생산 시스템, 수동 조립 스테이션, 완전 자동화 조립라인까지 상당히 광범위하다. 여기에는 전기 모터의 생산 시스템 뿐만 아니라 배터리 및 연료 전지 기술의 생산 및 조립 시스템까지 포함된다. GROB의 전기 모빌리티 사업부 산하 제어기술부 책임자인 Fabian Glöckler는 이를 다음과 같이 설명한다. “이 분야에서 GROB는 고객에게 생산 과정 전체를 제공하며, 전체 파워트레인을 위한 고객맞춤형 시스템도 제공하고 있습니다”
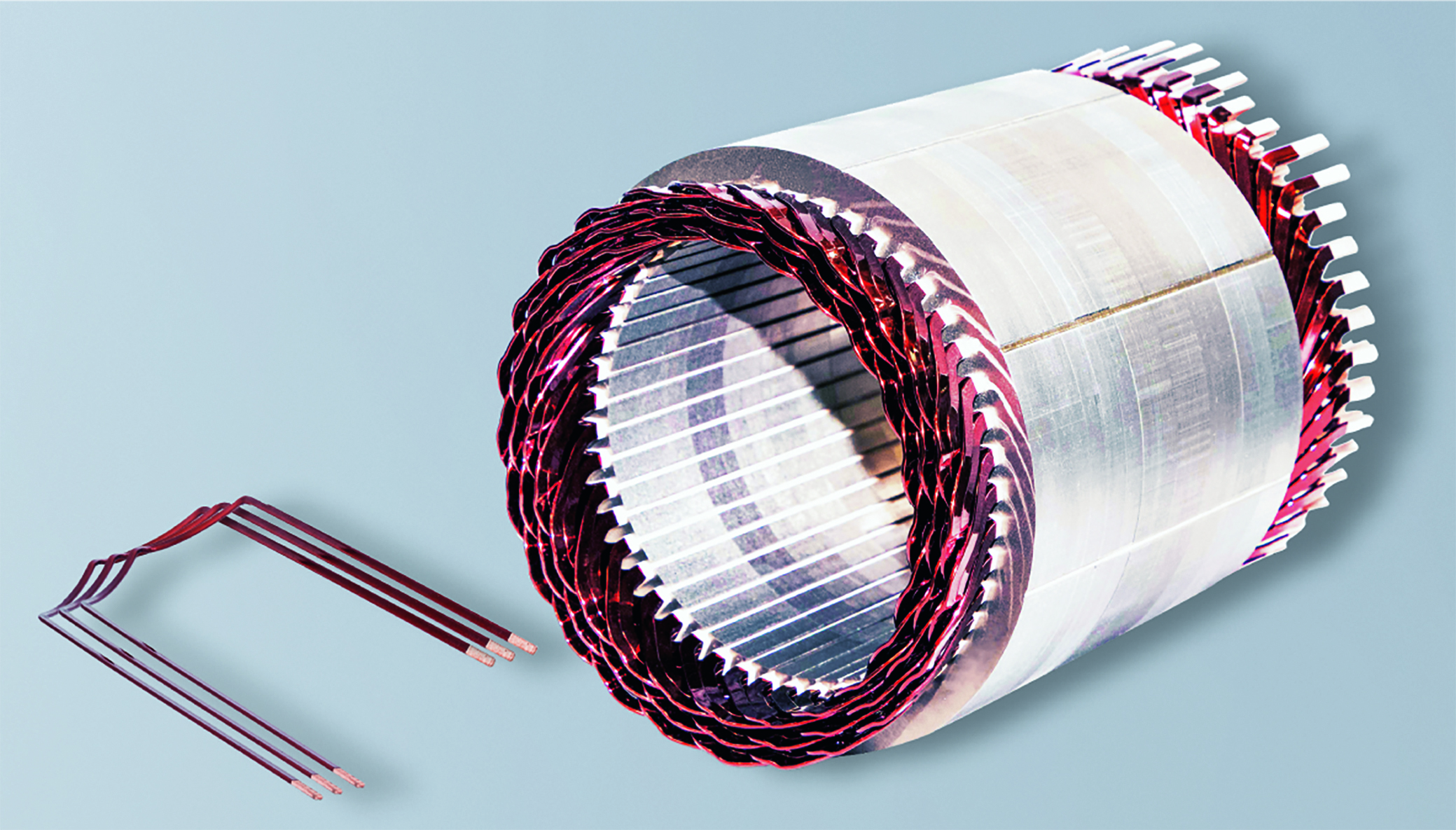
GROB의 전기 모터 스테이터(우측)에는 개별 헤어핀(좌측)으로 구성된 다수의 와인딩 림이 포함된다. © GROB-Werke
강력한 제어 기술이 필요한 전기 모빌리티 기술
전기 모빌리티를 지향하는 추세는 제어 기술에 대한 새로운 수요를 창출하고 있다. GROB의 전기 모빌리티 사업부 산하 기능 개발부의 그룹 관리자인 Martin Ellenrieder는 다음과 같이 설명한다. “내연기관을 위한 시스템과 비교할 때 이 시스템은 보다 정교한 스테이션, PLC 사이클 타임의 단축, 조립에서 차지하는 드라이브 기술의 비중 증가, 정교하게 연동된 동작 등이 특징입니다” 이는 전체적으로 Beckhoff의 제어 및 드라이브 기술이 탑재된 헤어핀 기계(2세대)에서도 분명하게 확인할 수 있다. GROB의 스핀들에 더해, 총 57개의 NC 축이 구현된다(실제 축 40개, 가상 축 5개, 개별 서보 축처럼 작동하는 XTS의 무버 12개). 또한 EtherCAT 및 TwinSAFE 터미널과 박스 모듈로 구성된 광범위한 I/O 레벨을 갖추고 있다(디지털 입력 270개 및 디지털 출력 150개).
초소형 산업용 PC인 C6030 및 C6032, TwinCAT 소프트웨어를 컨트롤 코어로 사용하는 기계는 헤어핀 당 2.3초에 불과한 사이클 타임을 바탕으로 매우 높은 출력 속도를 구현한다. 약 200개의 각각의 헤어핀은 각 스테이터마다 별도의 생산을 가능하게 한다. 이는 가공 공정의 복잡성과 구리 튜브 와이어 인피드에서부터 직렬 정렬, 복잡한 벤딩, 스트리핑과 사전 삽입 네스트 내에서의 정확한 포지셔닝까지 광범위한 제어 작업을 구현할 때 더욱 인상적이다.
•와이어 공급(코일에서 직선 구리 와이어까지, 와이어 절연에 대한 전기 테스트 포함 또는 미포함): 댄서 컨트롤을 위한 PC 기반 제어
•동작 중(on the fly) 구리 와이어 스트리핑: 축 포지셔닝, 캠 플레이트, 플라잉 쏘(flying saw)
•와이어 공급: 두 번째 엔코더 시스템에 대한 축 결합, 시스템의 작동 상태에 따른 엔코더 시스템 전환, 특수 작동 모드용 인터페이스를 통한 사용된 축의 전환(와이어 동반 또는 미동반 이송)
•와이어 검사: 이송 및 포지셔닝
•프레스 피팅/커팅: 프레싱/커팅 프로세스 동안 가상 기어 기능의 동적 커플링 계수를 통한 재료 배치 보상 및 캠 플레이트
•2D 벤딩: 가상 기어 기능의 동적 커플링 계수를 사용, 커플링되어 헤어핀 파라미터에 의해 생성되는 동적 캠 플레이트
•3D 벤딩: 가상 기어 기능의 동적 커플링 계수를 사용, XTS 무버에 커플링되어 헤어핀 파라미터에 의해 생성되는 동적 캠 플레이트
•헤어핀 사전 삽입: 캠 플레이트 또는 조정 모션
•사전 삽입 네스트 및 클램핑 핑거의 다양한 인피드 변형/포지셔닝 움직임: 가상 및 실제 축의 커플링
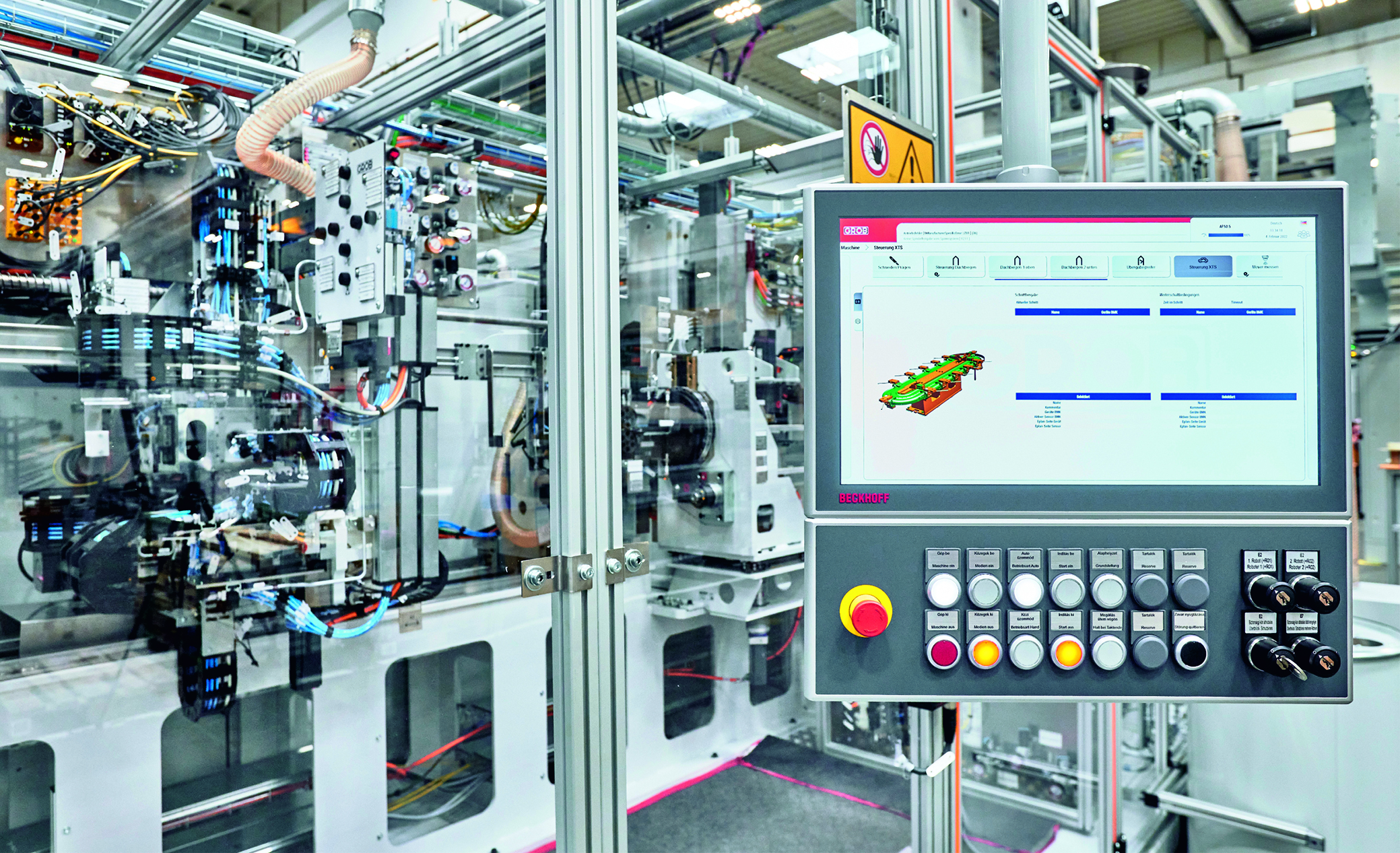
고객맞춤형 확장형 푸시 버튼과 TwinCAT HMI에 의해 구현된 편리한 사용자 인터페이스가 적용된 CP3918 멀티 터치 컨트롤 패널을 사용하면 모든 기계 기능의 사용성을 극대화할 수 있다. © Beckhoff
GROB의 전기 모빌리티 사업부, 전기 설계 그룹 책임자인 Daniel Gugenberger는 이러한 방식과 내연기관의 생산 간에 존재하는 차이를 다음과 같이 설명한다. “볼트 체결, 프레스 피팅, 수동 조립 작업과 같은 전통적인 조립 공정은 상당한 수준으로 자동화되어 왔으며, 기계 조작자 한 사람만으로는 요구되는 품질, 정확도, 속도를 충족할 수 없을 것입니다” 그는 시스템의 높은 처리량으로 인해 세부적인 기계와 공정 데이터가 매우 중요하며, 이 분야에서 Beckhoff의 PC 기반 제어 기술이 그 가치를 입증했다고 설명한다. “전체 제조 공정이 2초 안에 실행되는 경우, 생산 모니터링 및 오류 분석은 적절한 도구와 고속 카메라가 있을 때만 가능합니다. GROB는 이를 위해 TwinCAT Scope View 소프트웨어를 사용하는 경우가 아주 많습니다”
스테이터 와인딩 프로세스를 구축하기 위해서는 각기 다른 50개의 디자인으로 구성된 약 200개의 헤어핀이 필요하다. 이들은 사전 삽입 네스트 내에서의 배치를 위해 요구되는 순서대로 하나씩 생산된다. 따라서 인라인 오류 검출이 중요하다. Fabian Glöckler는 다음과 같이 설명한다. “재료 또는 형상 오류가 발생하는 경우 해당하는 헤어핀이 다시 생산되어 자동 공급을 통해 시스템 내 정확한 위치에 삽입되어야 합니다. 다수의 모션 축과 헤어핀 변형이 존재하는 상황에서 다양한 파라미터, 벤딩 각도, 캠 플레이트가 제 시간 안에 계산되어야 하기 때문에 이는 제어 기술 측면에서 엄청난 관리 작업이 필요하다는 것을 의미합니다”

C6030초소형산업용PC 는 모든 프로세스 시퀀스의 중앙 제어를 위한 최적의 연산력을 제공한다. © Beckhoff
입증된 자동화 시스템 및 혁신적인 HMI
2004년 초, 최초의 GROB 공정 기계에 Beckhoff 기술이 적용되었는데 이를 Martin Ellenrieder는 다음과 같이 회상한다. “처음에는 테스트 스탠드와 추가 매거진이 사용되었는데, 2017년에는 최초의 조립라인 또한 PC 기반 제어로 자동화되었습니다. 이러한 사용의 주요한 이유는 미래의 어플리케이션과 요구사항을 충족하는 짧은 제어 사이클 타임 및 높은 시스템 유연성 때문이었습니다. 여기에는 다양한 버스 시스템에 대한 수많은 인터페이스, 광범위한 모션 기능, 심층적인 진단 기능이 포함됩니다. TwinCAT은 개방성이라는 특수한 이점을 제공하기 때문에 MATLAB 통합을 통해 시스템 개발 프로세스를 원활하게 수행할 수 있습니다. 따라서 공정 엔지니어가 시뮬레이션을 테스트 시설에 손쉽게 통합할 수 있었습니다. 추가적인 측면으로는 E-CAD 시스템에서 HMI로의 자동 코드 생성, 자체 개발된 모션 제어 블록의 간단한 통합, 버전 제어, 버그 추적, 소프트웨어 테스트의 통합 등이 있습니다. 이에 더해, TwinCAT의 유연성을 통해 소프트웨어 개발 시 훨씬 더 쉽게 표준화를 구현할 수 있습니다”
초소형 산업용 PC인 C6030 및 C6032(더 많은 인터페이스가 요구되는 경우)는 고객맞춤형 푸시 버튼이 장착되어 있는 CP3918 멀티 터치 컨트롤 패널과 연결하여 사용된다. Fabian Glöckler는 다음과 같이 설명한다. “이 IPC는 4 ms PLC 사이클 타임이라는 목표를 안정적으로 달성하기에 충분한 연산력을 제공합니다. 이 외에도 디자인이 매우 콤팩트하고, 장착 방법 또한 다양합니다” 인간-기계 인터페이스의 경우, 간편하고 오류가 없는 기계 조작에 초점이 맞춰지는데, 이 회사는 초창기 단계부터 TwinCAT HMI를 사용해 왔다. “큰 규모의 HMI 프로젝트를 위해서는 처음부터 Beckhoff, 특히 뮌헨 지역에 위치한 자회사와의 긴밀한 협력이 중요했습니다. 이는 매우 효과적이었으며(예: HMI와 PLC 간의 자동 커플링 및 복수 언어 구현) 직관적인 사용성, 명료한 파라미터 표시, 심층적인 진단에 중점을 두고 GROB의 요구사항에 HMI를 맞춤화할 수 있었습니다. 그 결과 모든 시스템에 탁월한 일관성을 자랑하는 혁신적인 운영 개념을 적용할 수 있게 되었습니다”
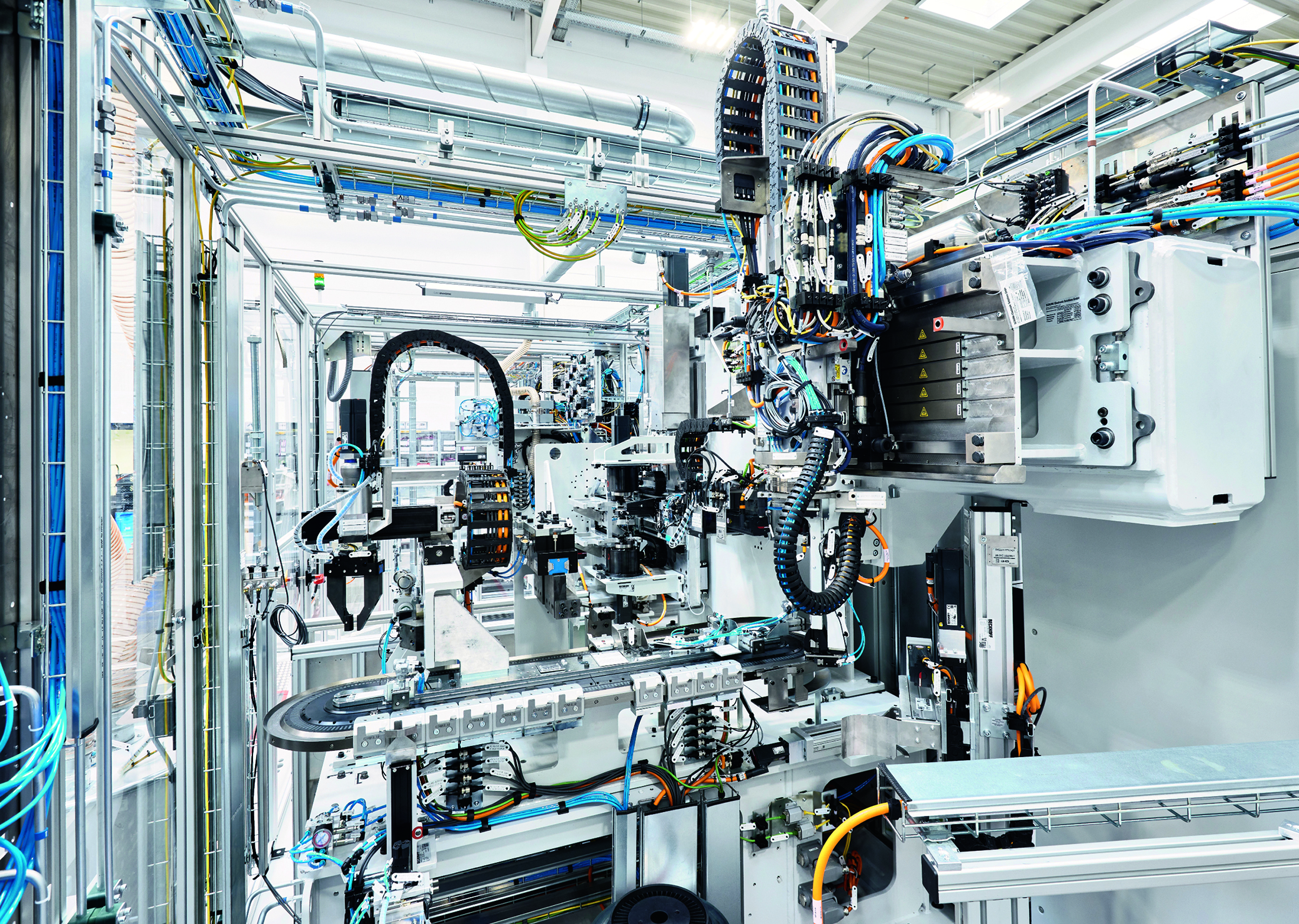
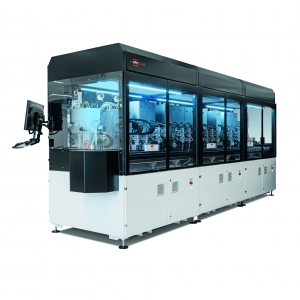
XTS 시스템까지 이르는 모션 시퀀스의 복잡성과 다양성을 보여주는 기계 내부(전면). © Beckhoff
서보 축 및 XTS를 통한 정교한 모션
서보 드라이브 AX5000, 콤팩트 드라이브 기술 EL72xx 및 EP72xx, 서보모터 AM8000을 사용하여 수많은 회전축이 구현된다. 이러한 맥락에서 Martin Ellenrieder는 One Cable Technology의 특별한 이점을 다음과 같이 설명한다. “OCT 덕분에 케이블 작업을 대폭 축소하고 오류 원천을 최소화할 수 있게 되었습니다. AX5000을 사용할 때의 다른 중요한 요소는 추가적으로 포함되는 TwinSAFE 옵션 카드 AX5805의 엔코더 인터페이스와 안전 모션 기능입니다” 또한 TwinCAT NC PTP, NC Camming, NC Flying Saw와 같은 TwinCAT의 다양한 기능도 중요 요소라고 설명한다.
회전 모션 축은 Beckhoff의 XTS에 의해 완성된다. 12개 무버가 장착된 3미터 길이의 타원형 트랙 시스템이 최종 삽입 프로세스를 위해 개별 헤어핀을 리니어 포탈로 이송한다. Daniel Gugenberger에 의하면, XTS는 시스템 유연성 강화 및 간편한 신규 기능 추가를 통해 어플리케이션에 이점을 제공한다. 그는 다음과 같이 설명한다. “우리는 전통적인 이송 작업 이외에도 다양한 가공 포지션(벤딩 및 카메라 스테이션)에서의 유연한 포지셔닝을 위해 XTS를 사용합니다. 또한 다른 스테이션을 손쉽게 통합할 수 있게 해주는 시스템의 간소한 디자인과 모듈성으로부터 상당한 이점을 얻고 있습니다. 이송 시스템은 구성요소 상태(구성요소 없음, 일차 벤딩, 이차 벤딩)에 따른 유연한 거리 제어, 사이클 타임 단축, 개별 프로세스의 분리(각기 다른 프로세스 시간이 기계 전체에 직접적인 영향을 미치지 못하도록 하기 위함)를 통해 추가적인 이점을 제공합니다”
Martin Ellenrieder는 TwinSAFE가 시스템 통합 안전 기능을 자체적으로 입증했으며, 안전 어플리케이션에서 높은 수준의 유연성을 제공한다고 설명한다. EL6910 TwinSAFE Logic 모듈은 드라이브 기반 안전 기술 외에 전용 안전 제어기로도 사용된다. 전체 생산라인에서 개별 기계 및 시스템의 분산된 안전 어플리케이션이 EtherCAT Automation Protocol(EAP)을 통해 서로 통신한다. Martin Ellenrieder는 다음과 같이 요약한다. “제어 시스템 경계를 넘나드는 이 안전 통신은 기계 안전에 있어 매우 중요한 측면인데, 우리 고객의 경우 일반적으로 상호 연결된 다수의 시스템을 사용하기 때문입니다”

Beckhoff의 콤팩트 드라이브 기술에 더해 AX5000서보드라이브 는 주로 AM8000 서보모터를 제어하는 데 사용되며, One Cable Technology(OCT)는 설치 공간 및 케이블 작업을 최소화하는 역할을 한다. © Beckhoff
링크:
www.grobgroup.com
www.beckhoff.com/automotive
연락처:
Beckhoff Automation Co., Ltd.
www.beckhoff.com/kr
info-kr@beckhoff.com













![[KOPLAS 2023 Preview] 삼보계량시스템(주), 플라스틱 펠렛 'PLATONⅡ'로 고객 눈길 사로잡다](https://file.yeogie.com/img.news/202302/md/4QINfMIE2G.jpg)


![[2026 국제 전기전력 전시회] 플루토테크놀로지, 내전압시험기·전압 계측 솔루션 공개](https://file.yeogie.com/img.news/202605/md/cudPKRhz59.jpg)



![[2026 국제 전기전력 전시회] 세진계기, 전원 품질 분석기·절연 접지 테스터 선봬](https://file.yeogie.com/img.news/202605/md/blGffWCD4e.jpg)
