수중 벽면주행로봇(사진. 제타크리젠)
국내 기술로 수중 로봇 분야에서 가시적인 성과를 달성하고 있는 (주)제타크리젠(이하 제타크리젠)이 대형 유조선이나 컨테이너운반선 등 해양 선박 관련 작업에 사용되는 수중 벽면주행로봇을 개발, 관련 애플리케이션 확보에 박차를 가하고 있다.
선박 벽면을 타고 오르는 수중 로봇
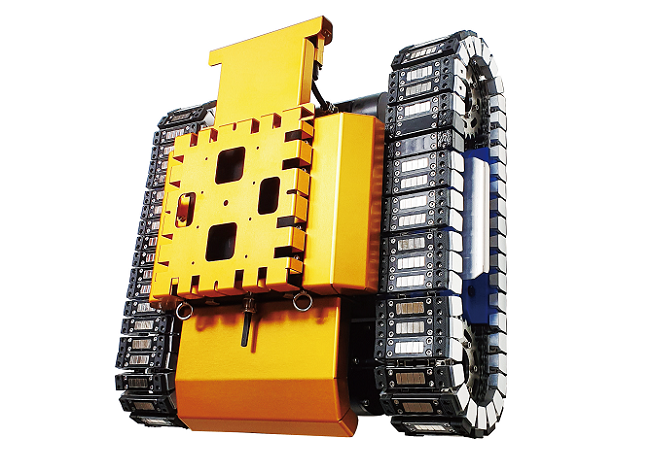
제타크리젠의 수중 벽면주행로봇은 마그네틱 크롤러(Magnetic Crawler) 형태로 개발됐다. 크롤러란 무한궤도를 갖춘 주행 장치의 한 형태로, 속칭 캐터필러라고 불리기도 한다. 이 로봇은 강력한 마그네틱을 통해 강철 구조의 벽면에 안정적으로 부착 및 주행이 가능하다.
본 수중 벽면주행로봇은 약 60㎏의 하중을 버티며 수직의 벽면에 부착돼 안정적으로 주행할 수 있다. 제타크리젠 관계자는 “해당 로봇 수준의 부착력과 추진력은 세계적으로 찾아보기 힘든 수준의 퍼포먼스”라고 설명했다.
다양한 해양 작업에 활용 가능
제타크리젠의 수중 벽면주행로봇은 보다 확장된 형태로 발전이 가능하기 때문에 다양한 해양 관련 애플리케이션에 적용될 수 있다.

강한 부착력과 추진력을 실현한 수중 벽면주행로봇(사진. 제타크리젠)
예를 들어, 대형 선박이 운항할 때 이끼류나 따개비 등이 선체에 달라붙는데, 이는 유속에 영향을 주고 연료 효율을 떨어뜨릴 수 있다. 이 같은 문제를 인력으로 해결하는 것은 인사사고 발생에 대한 위험이 있고, 선박이 운행 중인 상태에서 적시에 투입 인력을 구하기 어렵다는 문제점도 있다. 수중 벽면주행로봇은 이 같은 상황에서 효과적인 대안이 된다. 제타크리젠은 이와 관련해 현재 기술 고도화를 진행 중이다.
또한 암초 등에 부딪혀 선체에 구멍이 뚫리는 등의 긴급 상황 발생 시에도 해당 로봇의 주행 성능을 활용할 수 있다. 실제로 제타크리젠은 지난 2007년 태안 원유 유출 사태와 같은 문제 재발을 방지하기 위해 수중 벽면주행로봇 플랫폼을 베이스로 선체 구멍을 임시로 유지보수해주는 타공 봉쇄로봇을 개발하기도 했다.
한편 지난 2005년 설립된 제타크리젠은 일반 수영장 청소용 수중 청소로봇부터 산업용 수중 청소로봇까지 두루 취급하면서 국산화 개발의 필요성에 대해 인지했고, 지난 2012년 본격적으로 수중 로봇개발에 돌입했다. 현재 동사는 산업용 수중 청소로봇 분야에서 국내뿐만 아니라 세계적으로도 손꼽히는 기술력을 확보한 상황으로, 관련 수중 로봇 플랫폼 제조 기술력을 활용해 수중 벽면주행로봇 플랫폼 개발에 성공했다.

![[인터뷰]에프엔비솔루션(F&B Solution), 세계와 통하는 문이 되다](https://file.yeogie.com/img.news/202401/md/7QtvKiGXUe.jpg)
![[인터배터리 2024] 해성마그네트, 2차전지 원료 고자력 전자석 탈철기 소개!](https://file.yeogie.com/img.news/202403/md/2zwxE8tmb8.jpg)
![[인터배터리 2024] (주)성신콤프레샤, 급수식 콤프레샤 공개](https://file.yeogie.com/img.news/202403/md/KkJsfjPPC9.jpg)
![[인터배터리 2024] 덕산코트랜, 공냉식 냉각기 전시로 자사의 기술력 알린다](https://file.yeogie.com/img.news/202403/md/D69tWhdHdP.jpg)
![[인터뷰] 미래포, 종합 공구 메이커로 발돋움](https://file.yeogie.com/img.news/202402/md/UokyPaZwMF.jpg)




![[KOPLAS 2023 Review] 플라스틱의 지속 가능한 미래를 위한 키워드, ‘친환경’과 ‘탄소중립’①](https://file.yeogie.com/img.news/202303/md/jdyPATuPF3.jpg)


![[KOPLAS 2023 Preview] 삼보계량시스템(주), 플라스틱 펠렛 'PLATONⅡ'로 고객 눈길 사로잡다](https://file.yeogie.com/img.news/202302/md/4QINfMIE2G.jpg)